
|
|
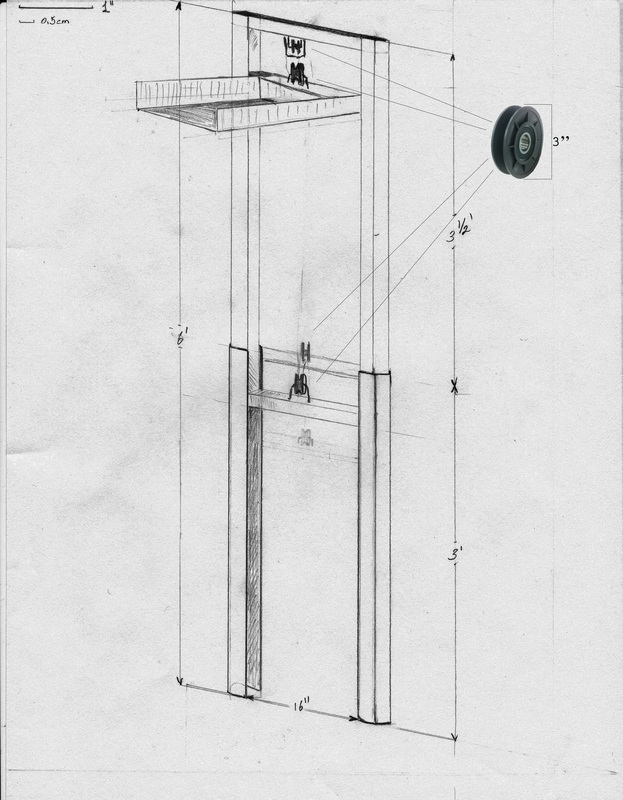
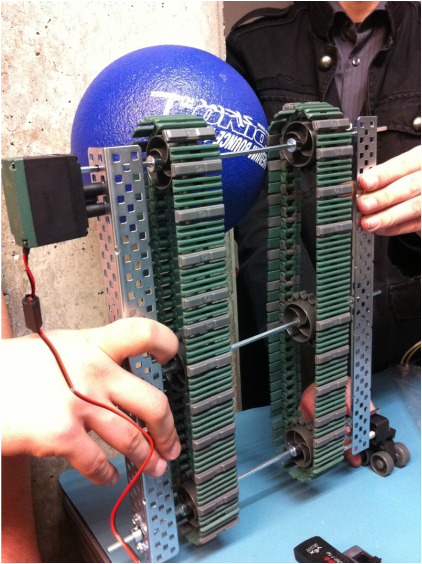
La plus grande difficulté de la compétition de cette année est les différents actuateurs. Pour la surmonter, notre performante équipe de mécanique a dessiné un bras robotisé qui peut prendre les balles et activer la balance ou le bouton poussoir. Malheureusement, le concept était si compliqué que nous aurions eu besoin d'une imprimante 3D. Nous avons donc choisi de bâtir un lift traditionnel comme vous pouvez voir sur la deuxième image. Pour activer la roue, nous avons choisi d’utiliser une autre roue plutôt qu’un bras, fixée à la hauteur de l’actuateur.
|
|

|
Pour ce qui est de prendre les balles, nous avons choisi la performance plutôt que la créativité, et avons utilisé un mécanisme présent dans plusieurs des compétitions précédentes. Nous avons fixé des tie wraps autour d’un axe en rotation pour prendre les balles et les acheminer vers la pince. Des chenilles adhésives complètent le montage.
|
|

|

|
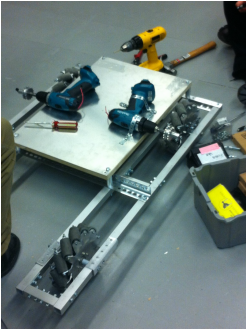
Puisque des points sont attribués pour le robot capable d’effectuer les tâches le plus vite, nous avons choisi les moteurs de perceuses rapides, mais moins puissant pour le déplacement. L'année passée, nous avions choisi des moteurs plus forts qui étaient beaucoup plus lent. Nous ne ferons pas la même erreur deux fois. Nous avons aussi utilisé des roues omnidirectionnelles pour l'avant pour ne pas avoir a utiliser 4 moteurs pour faire bouger le robot. |
